文献阅读:用于自主导航具有扩展传感器视野的自旋转单驱动无人机 |
您所在的位置:网站首页 › 华晨宇 整容过吗 › 文献阅读:用于自主导航具有扩展传感器视野的自旋转单驱动无人机 |
文献阅读:用于自主导航具有扩展传感器视野的自旋转单驱动无人机
|
最近,香港大学的研究人员们设计出了一种动力飞行超欠驱动 LiDAR (光探测和测距) 传感空中机器人 (PULSAR) ,这是可以在空中实现敏捷运动的自旋转无人机。相关研究刊登在 Science Robotics 2023年3月15日 第 8 卷 第 76 期上。 DOI网址:https://www.science.org/doi/10.1126/scirobotics.ade4538 文章PDF如下: 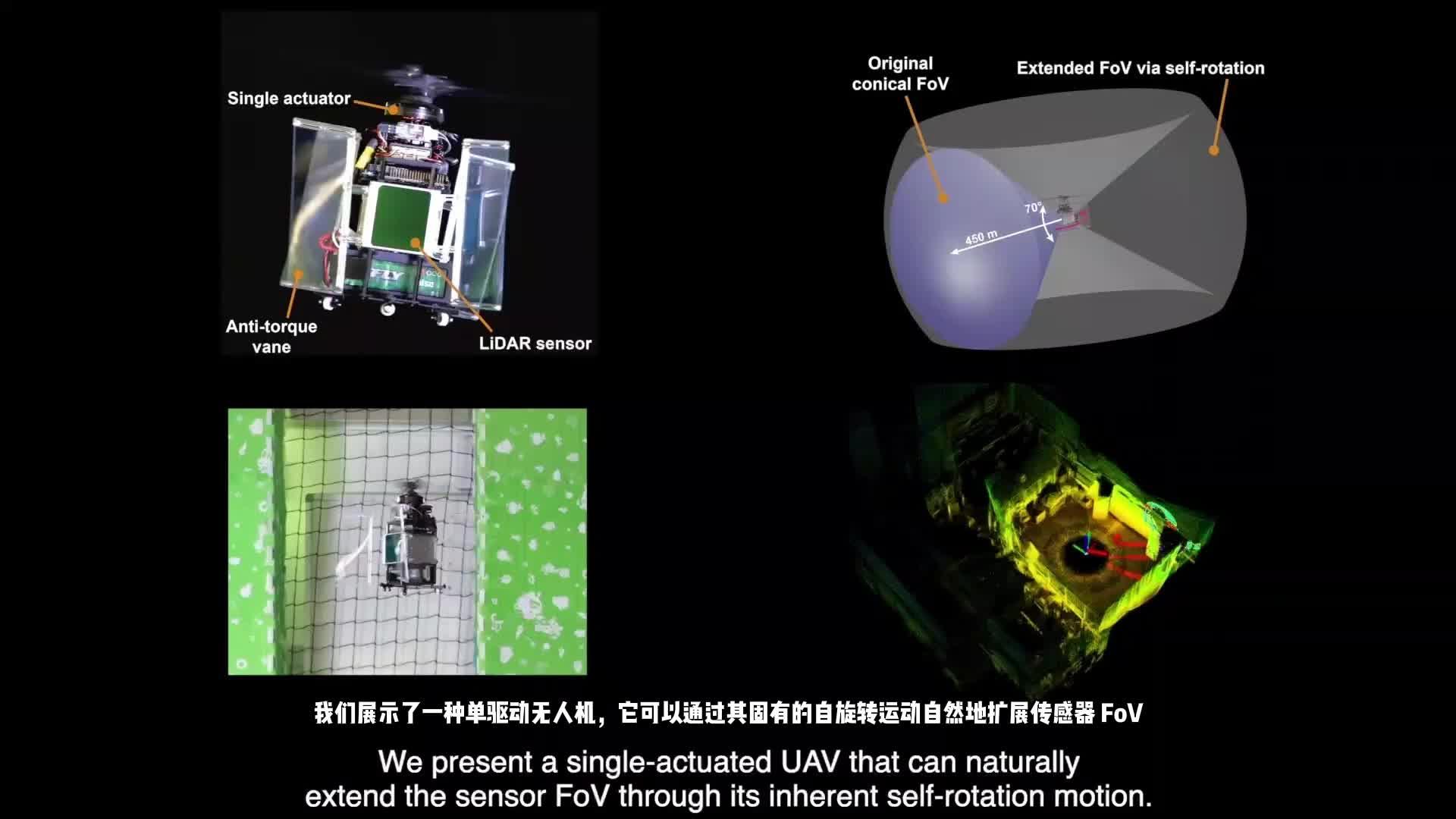 具有传感视野的自旋转无人机https://www.zhihu.com/video/1624695877825781761 具有传感视野的自旋转无人机https://www.zhihu.com/video/1624695877825781761无人驾驶飞行器 (UAV) 严重依赖视觉传感器来感知障碍物和探索环境。由于传感器视场 (FoV) 小,目前无人机在感知能力和任务效率方面都受到一定的限制。一种解决方案可能是利用无人机中的自旋转来扩展传感器 FoV,而不会消耗额外的功率。这种无人机电机反转矩引起的自然机制,由于高度耦合和非线性动力学导致设计和控制困难,以及高速自转给导航带来的挑战,很少被现有的自主无人机所利用。 研究人员们就提出了一种动力飞行超欠驱动 LiDAR (光探测和测距) 传感空中机器人 (PULSAR),这是可以在空中实现敏捷运动的自旋转无人机,其三维位置完全通过仅驱动一个电机来控制以获得所需的推力和力矩。使用单个执行器可有效减少动力飞行中的能量损失。因此,PULSAR 的功耗比基准四旋翼飞行器低 26.7%,具有相同的总螺旋桨面积和航空电子有效载荷,同时保持良好的敏捷性。 在机载 LiDAR 传感器的增强下,PULSAR可以在未知环境中执行自主导航,并在没有任何外部仪器的情况下检测全景中的静态和动态障碍物。研究人员们展示了 PULSAR 在环境探索和多向动态避障方面的实验,通过自旋转扩展 FoV 可以提高感知能力、工作效率和飞行安全性。 |
【本文地址】
今日新闻 |
推荐新闻 |